
Page 54 - MCU大廠分享10億級出貨秘訣
P. 54
50
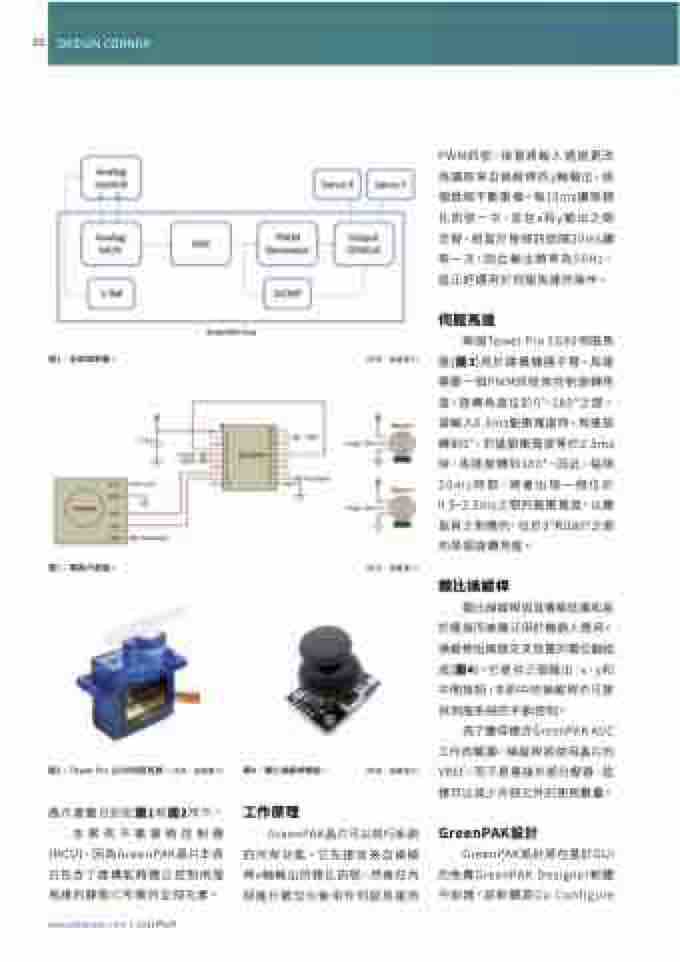
圖1:系統框架圖。
(來源:瑞薩電子)
PWM訊號,接著將輸入通道更改 為讀取來自操縱桿的y軸輸出,這 個過程不斷重複。每10ms讀取類 比訊號一次,並在x和y輸出之間 交替,相當於每個訊號隔20ms讀 取一次,因此輸出頻率為50Hz, 這正好適用於伺服馬達的操作。
伺服馬達
兩個Tower Pro SG90伺服馬 達(圖3)用於建構機器手臂。馬達 需要一個PWM訊號來控制旋轉角 度,旋轉角度位於0°~180°之間。 當輸入0.5ms脈衝寬度時,馬達旋 轉到0°,而當脈衝寬度等於2.5ms 時,馬達旋轉到180°。因此,每隔 20ms時間,將會出現一個位於 0.5~2.5ms之間的脈衝寬度,以獲 取與之對應的、位於0°和180°之間 的某個旋轉角度。
類比操縱桿因其價格低廉和易 於連接而被廣泛用於機器人應用。 操縱桿由兩個交叉放置的電位器組 成(圖4)。它提供三個輸出:x、y和 中間按鈕,本例中的操縱桿亦可提 供伺服系統的手動控制。
圖2:電路示意圖。
(來源:瑞薩電子)
類比操縱桿
圖3:Tower Pro SG90伺服馬達。(來源:瑞薩電子) 路示意圖分別如圖1和圖2所示。
圖4:類比操縱桿模組。 (來源:瑞薩電子) 工作原理
為了獲得適合GreenPAK ADC 工作的範圍,操縱桿將使用晶片的 VREF,而不是連接外部分壓器,這 樣可以減少外部元件的使用數量。
本案例不需要微控制器 (MCU),因為GreenPAK晶片本身 已包含了建構能夠獨立控制伺服 馬達的靜態IC所需的全部元素。
GreenPAK晶片可以執行系統 的所有功能。它先接收來自操縱 桿x軸輸出的類比訊號,然後在內 部進行數位化後用作伺服馬達的
GreenPAK設計
www.eettaiwan.com | 2022年6月
GreenPAK設計是在基於GUI 的免費GreenPAK Designer軟體 中創建,該軟體是Go Configure
DESIGN CORNER
