
Page 30 - 歷經一番寒徹骨DDR5記憶體主流時代即將來臨?
P. 30
28
目前,一些類型的感測器包括超聲 波、雷 射、雷 達、光、聲 學 和 光 學 系 統。未來,基於支持汽車之間進行 智慧交換的車對車系統,汽車將學 會相互通訊和互動。
基於不同類型感測器網路的 檢測結果,人工智慧系統透過複 雜和快速的演算法,能夠辨識汽 車周圍的一切。經過充分分析後, 人工智慧系統發送並發佈正確的 命令,以確保安全駕駛。換言之, 它計算巡航速度,並且需要為可能 的緊急剎車準備命令,或者就是確 保汽車不超過速度限制,所有這些 情況也必須透過視覺和聽覺警報 傳遞給駕駛。
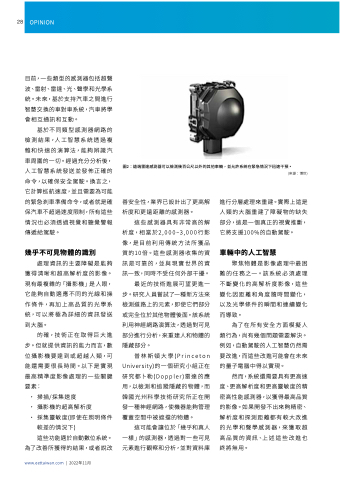
圖2:遠端雷達感測器可以檢測幾百公尺以外的其他車輛,並允許系統在緊急情況下迅速干預。
(來源:博世)
進行分層處理來重建。實際上這是 人類的大腦重建了障礙物的缺失 部分,這是一個真正的視覺推斷, 它將支援100%的自動駕駛。
聚焦物體是影像處理中最困 難的任務之一。該系統必須處理 不斷變化的高解析度影像,這些 變化因距離和角度隨時間變化, 以及光學條件的瞬間和連續變化 而導致。
幾乎不可見物體的識別
這些感測器具有非常高的解 析度,相當於2,000~3,000行影 像,是目前利用傳統方法所獲品 質的10倍。這些感測器收集的資 訊是可靠的,並與現實世界的資 訊一致,同時不受任何外部干擾。
車輛中的人工智慧
處理資訊的主要障礙是能夠 獲得清晰和超高解析度的影像。 現有最複雜的「攝影機」是人眼, 它能夠自動適應不同的光線和操 作條件,再加上高品質的光學系 統,可以將極為詳細的資訊發送 到大腦。
最近的技術進展可望更進一 步。研究人員嘗試了一種新方法來 檢測道路上的元素,即使它們部分 或完全位於其他物體後面。該系統 利用神經網路演算法,透過對可見 部分進行分析,來重建人和物體的 隱藏部分。
為了在所有安全方面模擬人 類行為,尚有幾個問題需要解決。 例如,自動駕駛的人工智慧仍然需 要改進,而這些改進可能會在未來 的量子電腦中得以實現。
的確,技術正在取得巨大進 步。但就提供資訊的能力而言,數 位攝影機要達到或超越人類,可 能還需要很長時間。以下是實現 最高精準度影像處理的一些關鍵 要 素:
普林斯頓大學(Princeton University)的一個研究小組正在 研究都卜勒(Doppler)雷達的應 用,以檢測和追蹤隱藏的物體,而 韓國光州科學技術研究所正在開 發一種神經網路,使機器能夠管理 覆蓋空間中被遮擋的物體。
然而,系統還需要具有更高速 度、更高解析度和更高靈敏度的精 密高性能感測器,以獲得最高品質 的影像。如果開發不出來夠精密、 解析度和探測距離都有較大改進 的光學和聲學感測器,來獲取超 高品質的資訊、上述這些改進也 終將無用。
• 掃描/採集速度
• 攝影機的超高解析度
• 採集靈敏度(即使在照明條件
較差的情況下)
這可能會讓位於「幾乎和真人 一樣」的感測器,透過對一些可見 元素進行觀察和分析,並對資料庫
這些功能適於自動數位系統。 為了改善所獲得的結果,或者說改
www.eettaiwan.com | 2022年11月
善安全性,業界已設計出了更高解 析度和更遠距離的感測器。
OPINION
